

Autonome Navigation
Fabriken im Zeitalter von Industrie 4.0 erfordern flexibel und frei navigierende Transportsysteme. Zukunftsmusik? Wir geben den Ton an!
3D Umgebungserfassung
Die Erfassung genauer Umgebungsinformationen durch Sensoren und Datenfusion liefert die Grundlage für Entscheidungen autonomer mobiler Systeme. Wir helfen Robotern die Welt zu sehen und zu verstehen.

Autonome Roboternetzwerke aus Drohnen, Bodensystemen und Menschen
Komplexe Aufgaben erfordern die Koordination und Kooperation von autonomen Robotern unterschiedlichen Typs. Wir ermöglichen effiziente Zusammenarbeit in Mensch-Roboter-Teams.
Mobile Systeme
Der Mobilität eröffnet sich aktuell durch Fortschritte in der Digitalisierung, durch Vernetzung, Sensorik zur Umgebungscharakterisierung und autonomen Reaktionsfähigkeiten enormes Innovationspotenzial. Sich selbständig und hochzuverlässig fortbewegende Fahrzeuge in Fabrikhallen und im Straßenverkehr werden so auf Basis moderner Digitalisierungstechnik (insbesondere bei Telekommunikation, Elektronik, Kontrolltechnik und Datenverarbeitung) immer schneller Realität.
So bieten mobile Roboter auf dem Boden, in der Luft und im Wasser Einsatzbereiche in Industrie und Wirtschaft, im Sicherheitssektor sowie in Privathaushalten. Autonome und teleassistierte Transportroboter können sowohl Aufgaben in unsicheren, gefährlichen oder monotonen Einsatzumgebungen übernehmen. Zusätzlich steigern sie die Produktivität in dynamischen Produktionsumgebungen und erschließen so neue Anwendungsgebiete im Privat-, Sicherheits-, Handels- und Industriebereich.
Um diese Vision künftiger Mobilität mit weiterzuentwickeln, arbeitet das Zentrum für Telematik seit seiner Gründung am Einsatz der Telematikmethoden im Bereich der mobilen Roboter. Dabei wurden Technologien für autonome, vernetzte und kooperierende mobile Systeme entwickelt, und für die Lösung von Aufgaben bei konkreten Anwendungen eingesetzt.
Zahlreiche Projektbeispiele, die in EU-, BMWi-, BMBF- und Industriedirektprojekten durchgeführt wurden, werden auf den folgenden Seiten vorgestellt und sollen Ihnen Anregungen geben, welche maßgeschneiderten mobilen Lösungen das Zentrum für Telematik auch für Ihre Problemstellungen entwickeln kann.
Themen


Projekte

DroneResponseNet: Lageerkundung durch automatisierten Drohneneinsatz aus der Leitstelle
Die Einschätzung von Einsatzlagen ist für Leitstellen von Behörden und Organisationen mit Sicherheitsaufgaben (BOS) zeitkritisch und organisationsübergreifend entscheidend, um Einsatzpersonal quantitativ und qualitativ lagegerecht einzusetzen. Da Drohnen ein ausgedehntes Gebiet in kurzer Zeit erfassen können, bergen sie hierfür großes Potential. DroneResponseNet will deshalb ein Leitstellen-gestütztes Drohnensystem entwickeln, welches einen Mehrwert bildet.
Weiterlesen
AutoDok Autonome Unfalldokumentation
Das Forschungsprojekt AutoDok entwickelt eine vollintegrierte, drohnengestützte Lösung zur polizeilichen Dokumentation und Beweissicherung bei unübersichtlichen Großschadenslagen, wie z.B. schweren Verkehrsunfällen. Der Drohneneinsatz ermöglicht dabei eine autonome, umfassende, sichere und deutlich schnellere Erfassung. Das in ein spezielles Einsatzfahrzeug integrierte System deckt den gesamten Prozess von Transport, Flugplanung und -überwachung sowie gleichzeitiger 3D-Modellerstellung und Generierung von georeferenzierten, maßstabgetreuen Fotos ab.
Weiterlesen
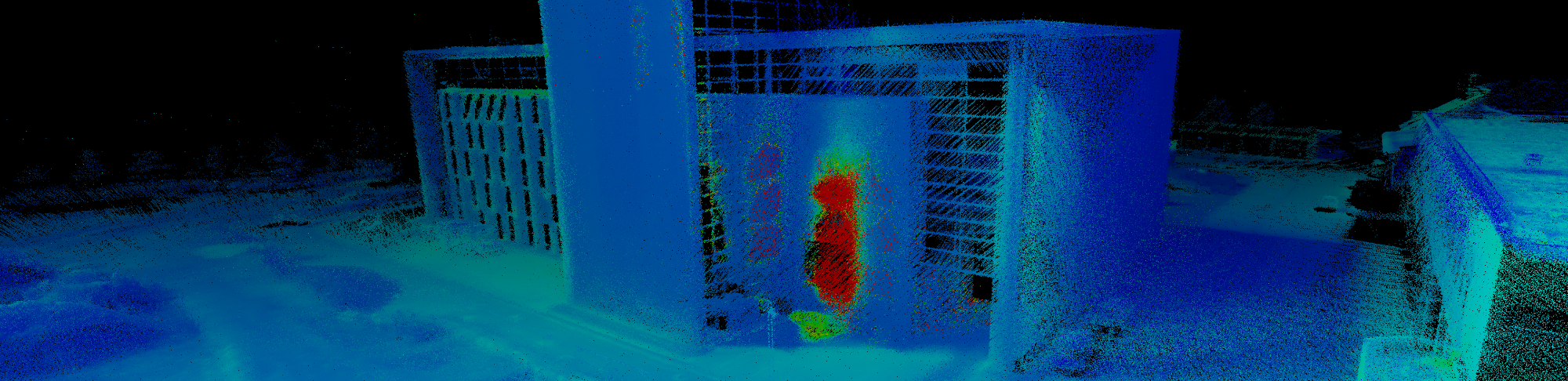
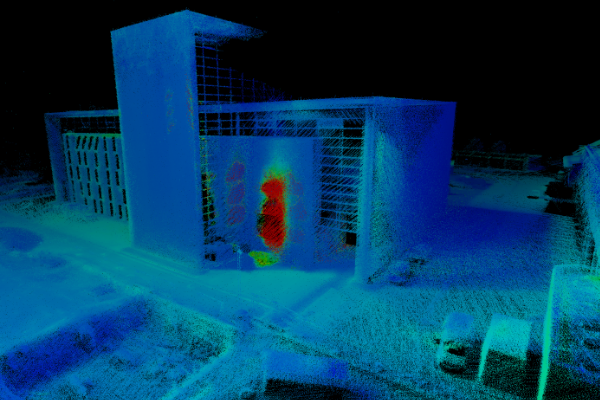
DEALS3D: Denkmalschutz 3D
Im Projekt DEALS3D wird eine technische Lösung zur Erstellung genauer dreidimensionaler Modelle von kulturell relevanten Gebäuden entwickelt. Zur Erfassung aller benötigten Perspektiven werden durch bodengebundene 3D-Sensoren und durch von unbemannten Flugsystemen getragene Sensoren Aufnahmen erzeugt und automatisiert fusioniert.
Weiterlesen
Eins3D - Luftbasierte Einsatzumgebungsaufklärung in 3D
Bei Großschadenslagen wie Großbränden, Massenkarambolagen oder großflächigen Überschwemmungen ist es für die Einsatzleitung der Rettungskräfte schwer einen Überblick über die Lage vor Ort zu erhalten. Des Weiteren können Änderungen der Schadenslage meist nur zeitverzögert registriert werden, was eine effektive Leitung der Einsatzkräfte ist dadurch erheblich erschwert.
Weiterlesen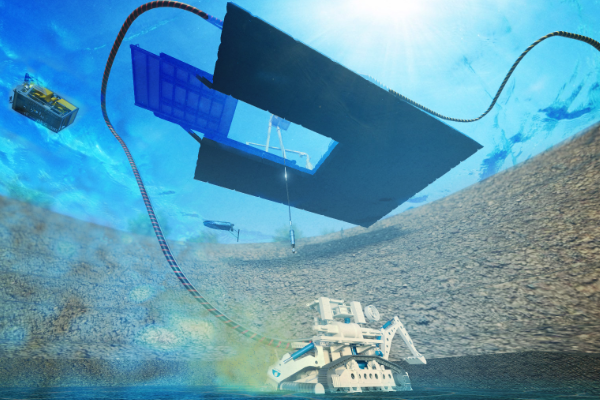
¡VAMOS!
Ziel des Projekts ¡VAMOS! (Viable Alternative Mine Operating System) ist die Entwicklung und Bau eines Unterwasserroboters für den Abbau von Mineralien in gefluteten Tagebauten.
Weiterlesen
LiBeRo
Der Linienbeschichtungsroboter ist ein System zum automatisierten, präzisen Auftrag von Linienmarkierungen auf verschiedenen Böden. Anwendungsbeispiele sind Markierungen in Fabrikhallen, Schwimmbad-Böden oder Fahrbahnen.
Weiterlesen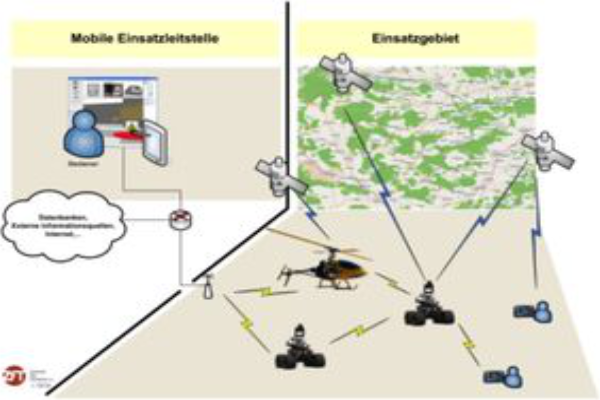
SiNafaR - Sichere Navigation für autonome Robotikplattformen
Einer zivilen Nutzung autonomer mobile Roboter stehen bisher oft sicherheitstechnische Aspekte im Weg. Können diese jedoch erfüllt werden, ergeben sich neue Chancen der Vermarktung in einem sehr großen Umfang.
WeiterlesenMagdalene-Schoch-Str. 5
97074 Würzburg - Germany
Daniel Eck (Geschäftsführer)
Telefon: +49 (0)931 615 633-10
Fax: +49 (0)931 615 633-11
E-Mail: info(at)telematik-zentrum.de