
¡VAMOS!
02.02.2015
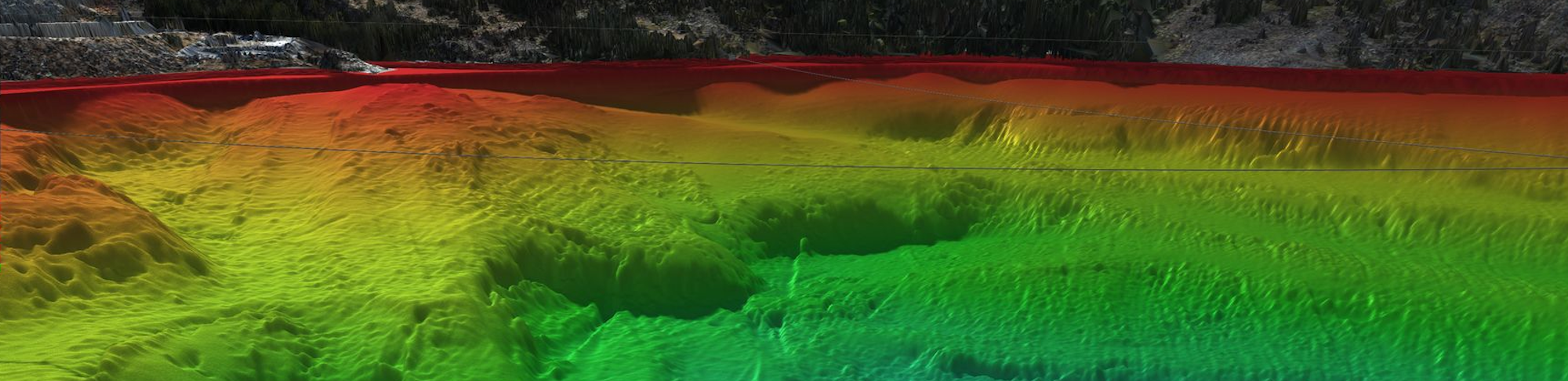
Ziel des Projekts ¡VAMOS! (Viable Alternative Mine Operating System) ist die Entwicklung und Bau eines Unterwasserroboters für den Abbau von Mineralien in gefluteten Tagebauten.
Projektinhalt
In diesem Horizon 2020 Projekt beschäftigt sich das ZfT mit der Entwicklung einer Telematikschnittstelle für einen ferngesteuerten Unterwasserbergbauprototypen. ¡VAMOS! soll eine sichere und saubere Bergbautechnik mit geringer Sichtbarkeit entwickeln und die Wirtschaftlichkeit für den Abbau bisher nicht erreichbarer Mineralienvorkommen zeigen.
Weitere Informationen sind auf der Homepage zu finden.
Laufzeit
1.Februar 2015 - 31.Juli 2018
Konsortium
- BMT Group Ltd
- Soil Machine Dynamics Ltd
- Damen Shipyards Group
- Instituto de Engenharia Sistemas e Computadores
- Fugro EMU Limited
- Zentrum für Telematik e.V.
- Montanuniversität Leoben
- Minerália, Lda
- Marine Minerals Ltd
- Empresa de Desenvolvimento Mineiro SA
- Sandvik Mining and Construction G.m.b.H
- Geological survey of Slovenia
- La Palma Research Centre for Future Studies
- European Federation of Geologists
- Trelleborg Ede Bv
- Federalni zavod za Geologijo and Fondacija za obnovu I razvoj regije Vareš
Förderung
Dieses Projekt wird durch das EU Programm Horizon 2020 gefördert.
Kontakt
E-Mail: 
Publikationen (einblenden)
J. Almeida, A. Martins, C. Almeida, A. Dias, B. Matias, A. Ferreira, P. Jorge, R. Martins, M. Bleier, A. Nüchter, J. Pidgeon, S. Kapusniak, E. Silva
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Madrid, Spain (2018)
p. 1527-1533
http://dx.doi.org/10.1109/IROS.2018.8593869.pdf
Magdalene-Schoch-Str. 5
97074 Würzburg - Germany
Daniel Eck (Geschäftsführer)
Telefon: +49 (0)931 615 633-10
Fax: +49 (0)931 615 633-11
E-Mail: info(at)telematik-zentrum.de